Content
- What is a system? Why are they challenging to understand?
- Simulation to understand system dynamics.
- Optimization to make decisions about managing systems.
- Sensitivity Analysis: What matters?
Lecture 20
December 3, 2025

Most search algorithms look for critical points to find candidate optima. Then the “best” of the critical points is the global optimum.
Two common approaches:
These methods work pretty well, but can:
These methods work pretty well, but can:

These methods work pretty well, but can:

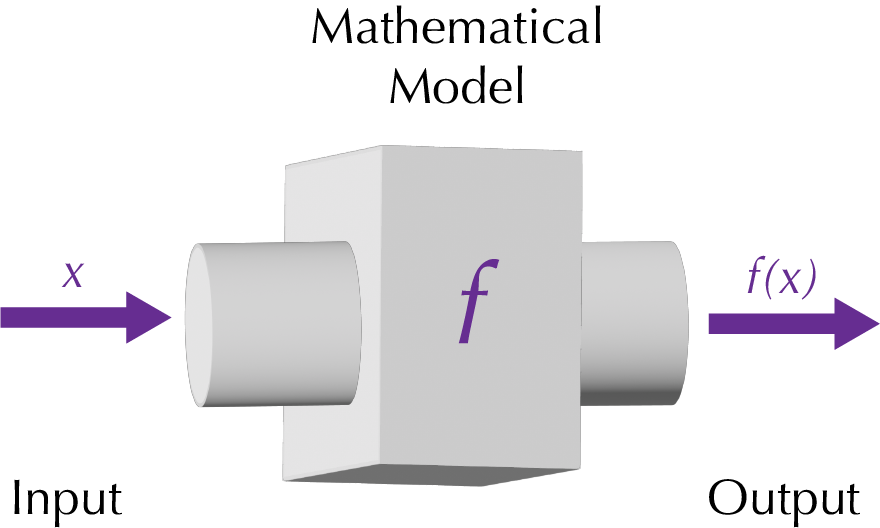
Simulation-Optimization involves the use of a simulation model to map decision variables and other inputs to system outputs.
What kinds of methods can use for simulation-optimization?
Challenge: Underlying structure of the simulation model \(f(x)\) is unknown and can be complex.
We can use a search algorithm to navigate the response surface of the model and find an “optimum”.