System Boundaries and Feedbacks
Lecture 04
September 8, 2025
Mathematical Models of Systems

Conceptual Model of a System
Environmental Systems

- Municipal sewage into lakes, rivers, etc.
- Power plant emissions into air
- Solid waste placed on landfill
- CO2 into atmosphere
Questions?
Text: VSRIKRISH to 22333
Defining the System Scope
- “Internal” system dynamics vs. “external” conditions is somewhat arbitrary.
- Internal dynamics go into a model.
- External conditions are “forcings,” initial conditions, or assumptions.
Example: Lake Eutrophication
Simple model of lake eutrophication:
Assume steady-state behavior, first-order linear decay, well-mixed, constant volume.
But in reality:

Systems Diagrams
Schematic of processes resulting in lake eutrophication
Possible System/Life Cycle Framework
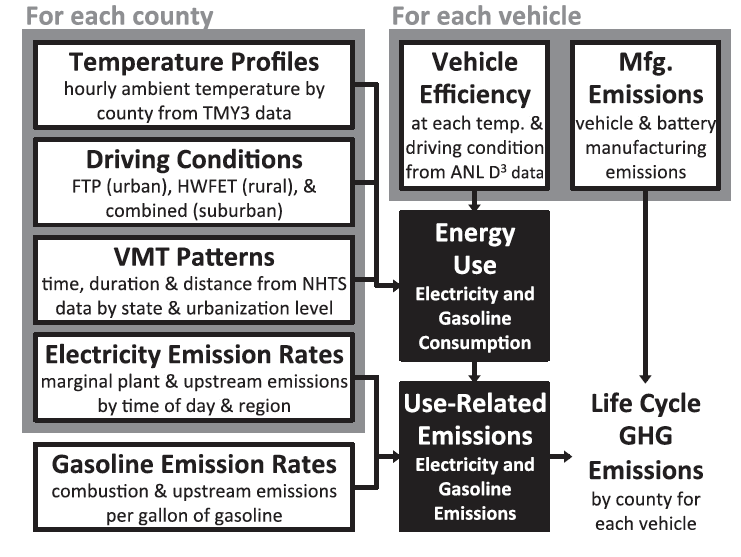
Schematic of PHEV LCA Framework
Source: Yuksel et al. (2016)
PHEV vs. Gasoline Outcomes
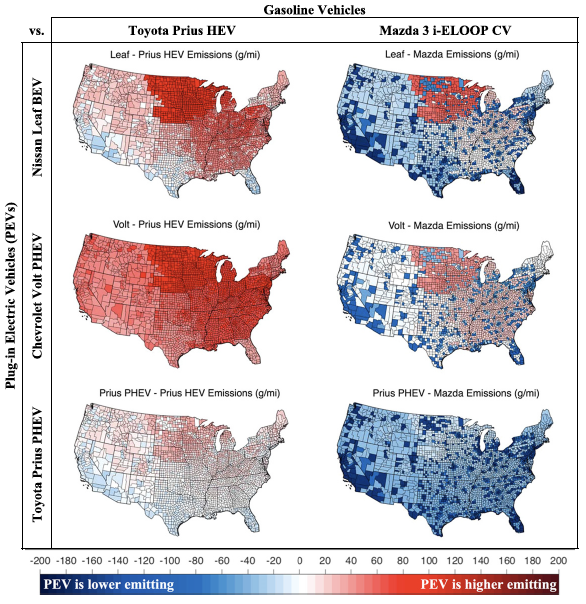
PHEV Comparison
Source: Yuksel et al. (2016)
Feedback Types
Feedbacks are “loops” in a system diagram.
Feedbacks can be:
- Amplifying (sometimes called “positive”)
- Dampening (sometimes called “negative”)
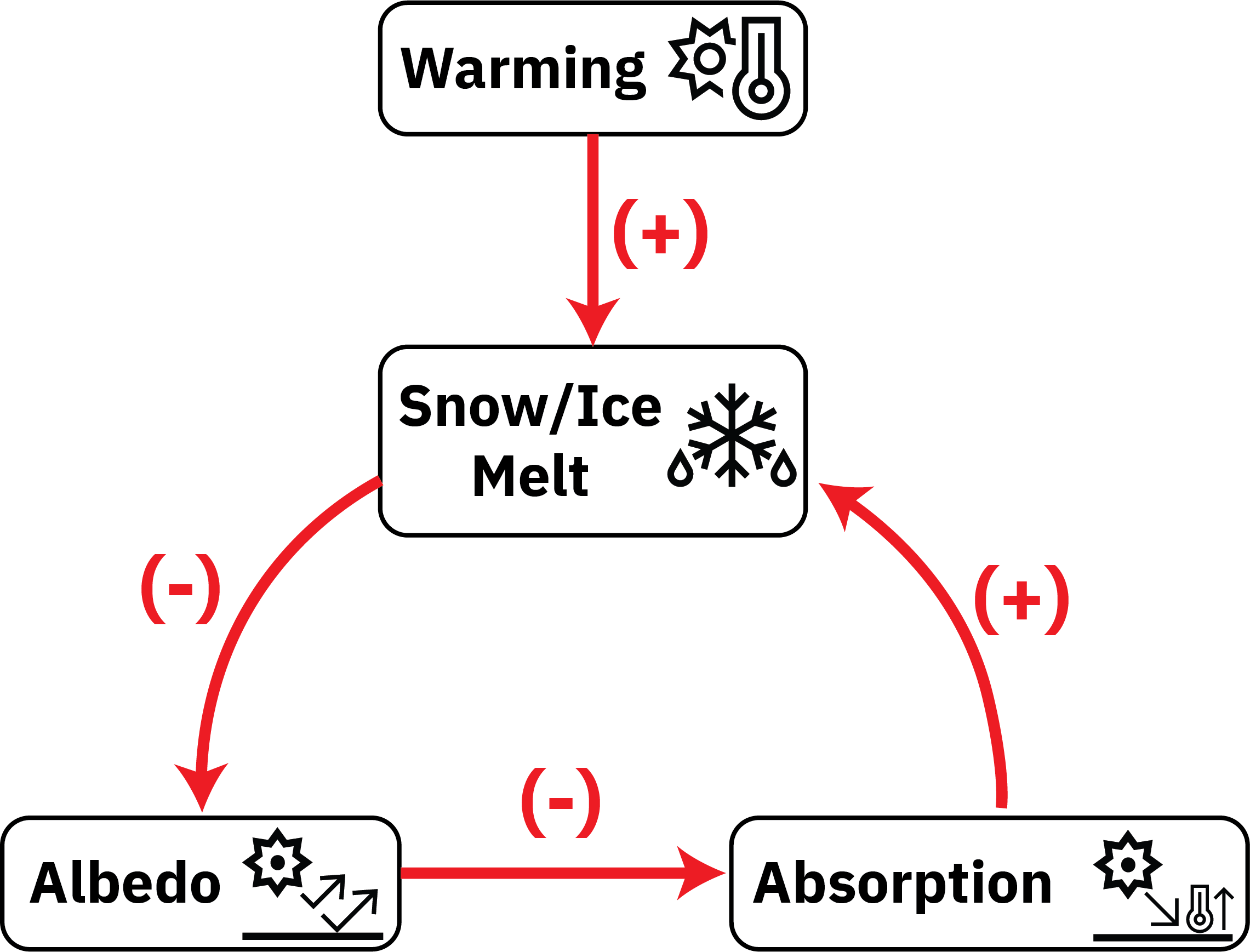
Amplifying Feedbacks
Shocks will amplify as they are propagated:

Dampening Feedbacks
Shocks are attenuated (dampened) as they propagate:
Simple Example
Consider the following production system:
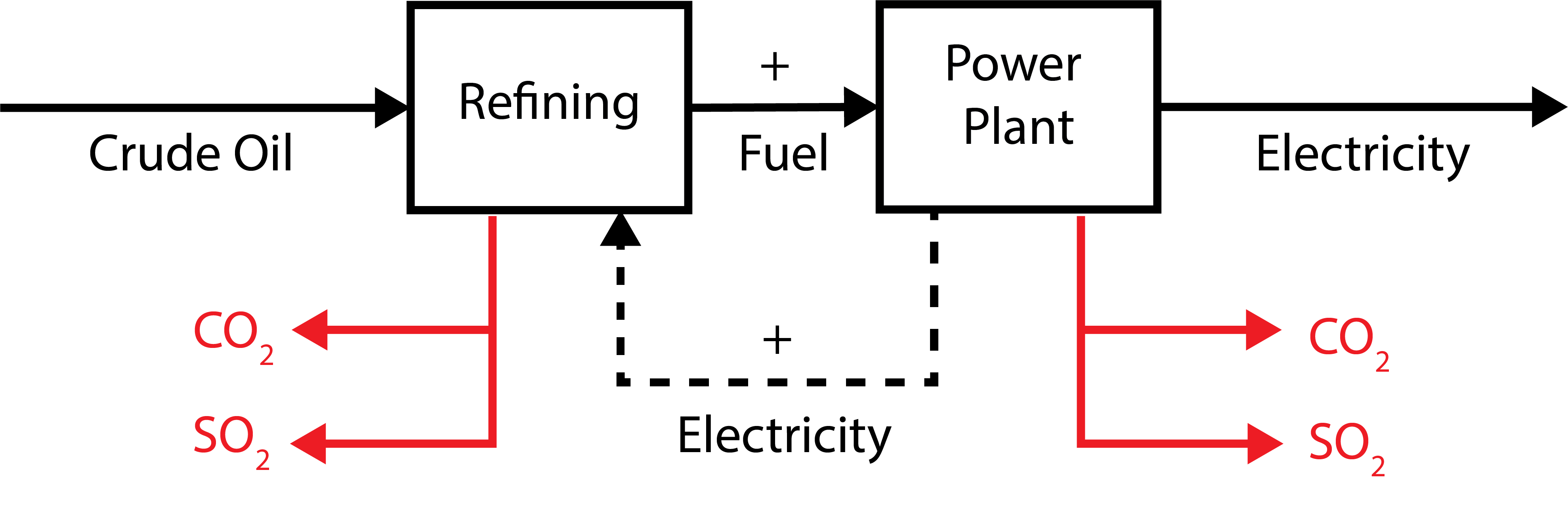
Electricity Production
Simple Example
If we neglect the electricity feedback, what are the lifecycle implications of generating 1000 kWh of electricity?
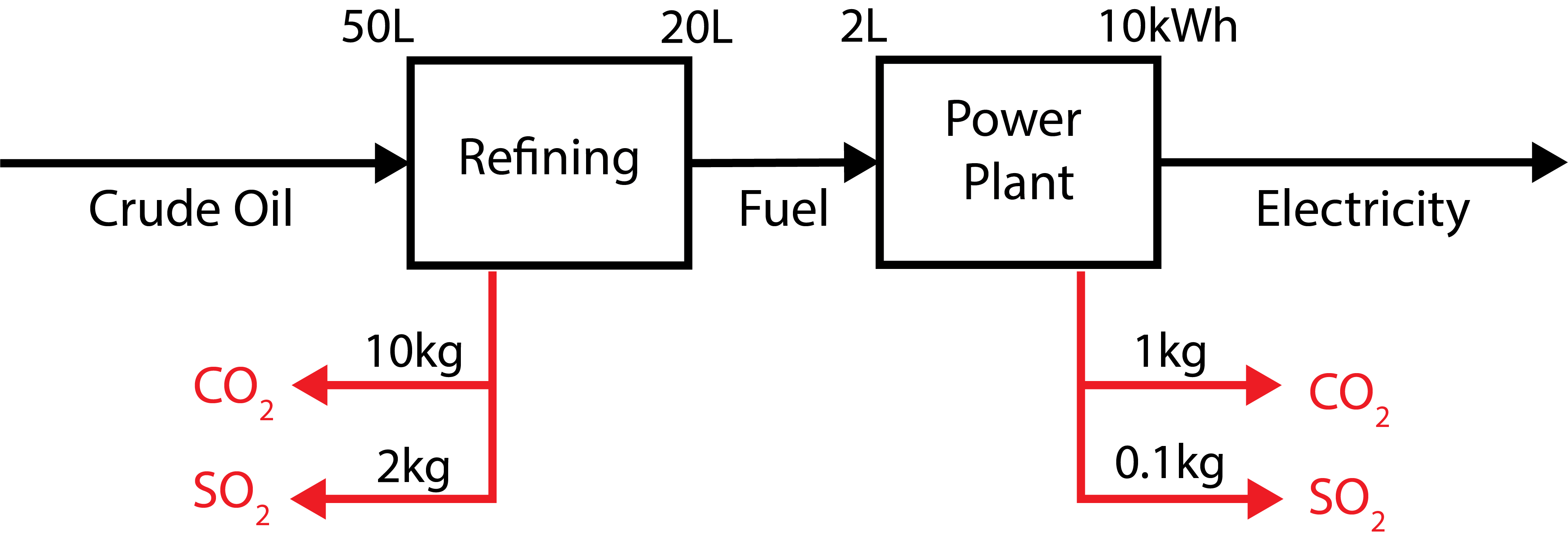
Electricity Production
Simple Example
What about if we include the feedback?
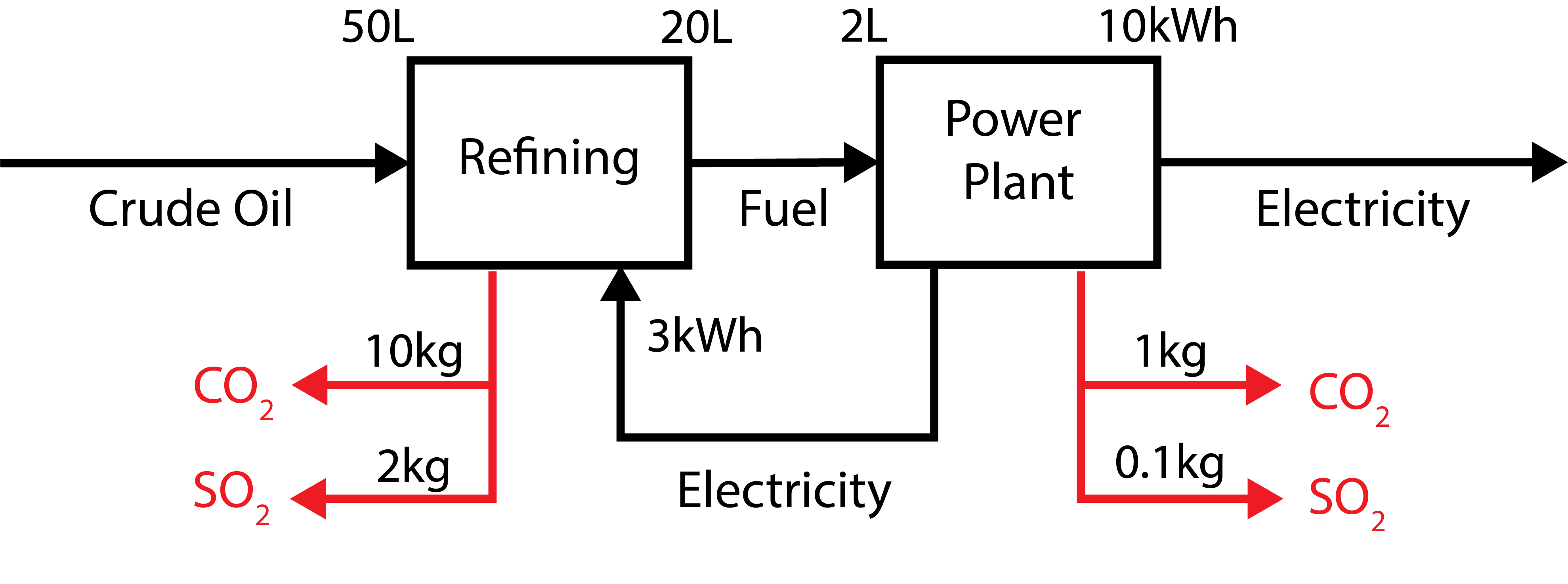
Electricity Production
Climate System Feedbacks
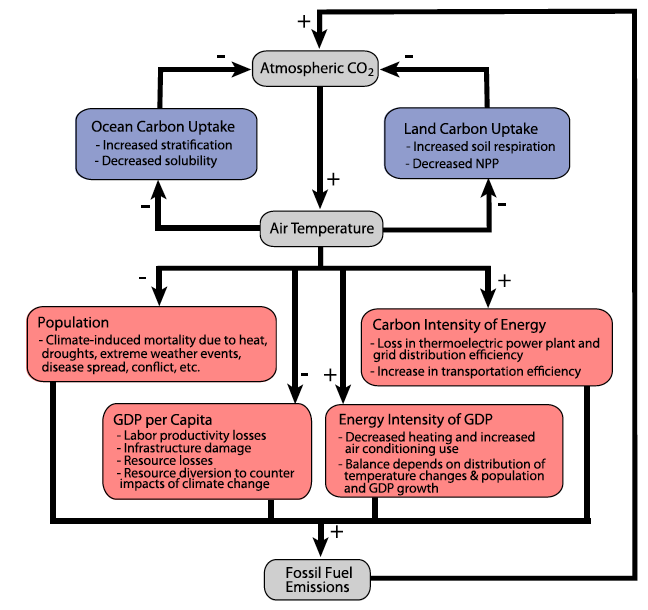
Climate Feedbacks Comparisons
Source: Woodard et al. (2019)
Impact of Including Feedbacks
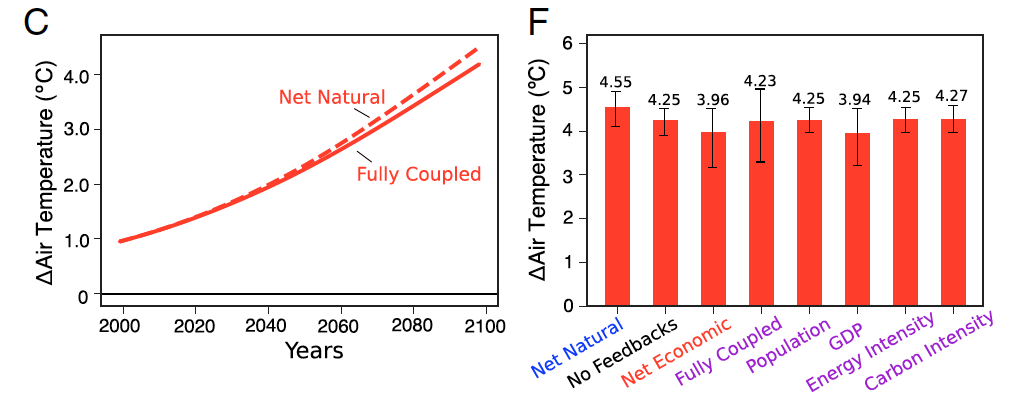
Climate Feedbacks Comparisons
Source: Woodard et al. (2019)
Impact of Including Feedbacks
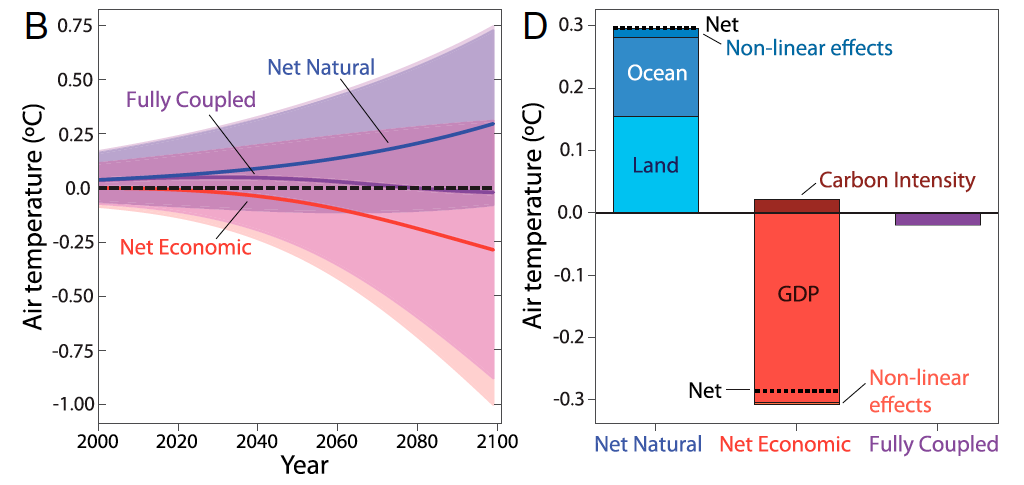
Climate Feedbacks Comparisons
Source: Woodard et al. (2019)